TL;DR: The kinematic constraint imposes the redistribution of forces on the four wheels. This redistribution is permitted due to the car differential.
IMHO it is easier understand this if you first understand the difference between kinematics and kinetics.
- kinematics: are about the geometry of motion (kinematics don't take into account forces or work).
- kinetics: this is how forces and moments affect the motion --- and vice versa (i.e. if you know the motion determine the forces).
small interlude/example
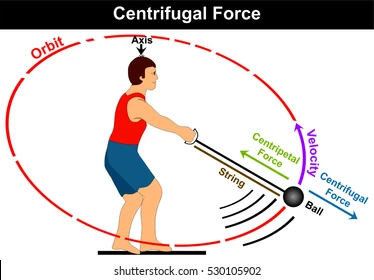
It is very common that first the kinematics is considered and then the kinetics are applied. Consider the following example of a hammer athlete:
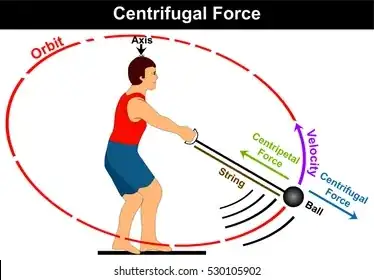
Assuming:
- the person and hammer is rotating at a constant angular speed $\omega$ and
- the distance between the axis of rotation and the hammer is R
- the string has no weight
then through the kinematics I know that the angular velocity is $\omega$, and the angular acceleration is $0$. And I can calculate at any time the angular position if I know the angular position at t=0.
Given the above information I can find out the force that the athlete has to apply on the string that is required for this motion to be accomplished. This is done through the use of kinematics. I.e. knowing the motion I can calculate the forces requires to produce this motion.
My point here is that:
the motion constraints can impose/determine the required forces.
Car example
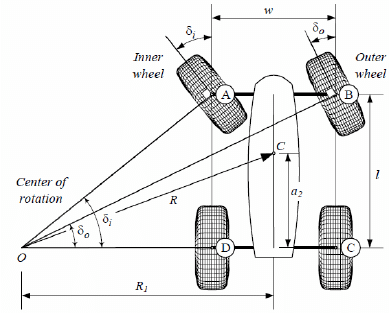
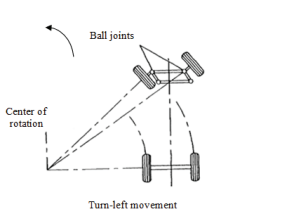
In the example you are providing, (the car during a turn without slipping), kinematics play the primary role. I.e. the rear inner wheel needs to travel a smaller distance over the same time compared to the outer wheel.
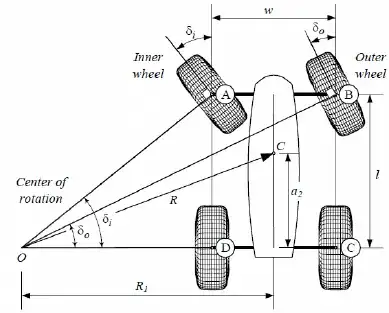
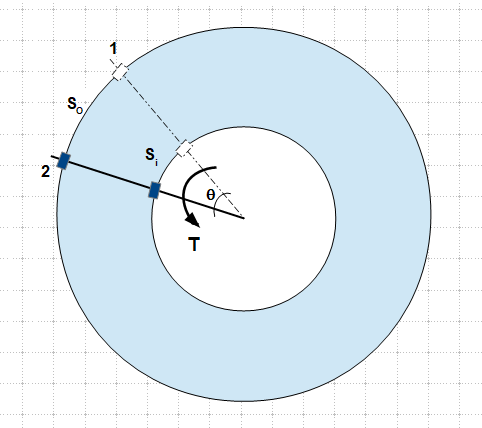
if the symbols in the above image are used, then for a turn of angle $\theta$ the distance travelled is:
- rear inner: $=(R-\frac{w}{2})\theta$
- rear outer: $=(R+\frac{w}{2})\theta$
(When there is no sliding) Kinematics also determines the velocity and acceleration for each of the wheels.
After that point, since the position, velocity and acceleration for each wheel are known, then you can use the kinetics (inverse) to see what forces are required to produce that motion.
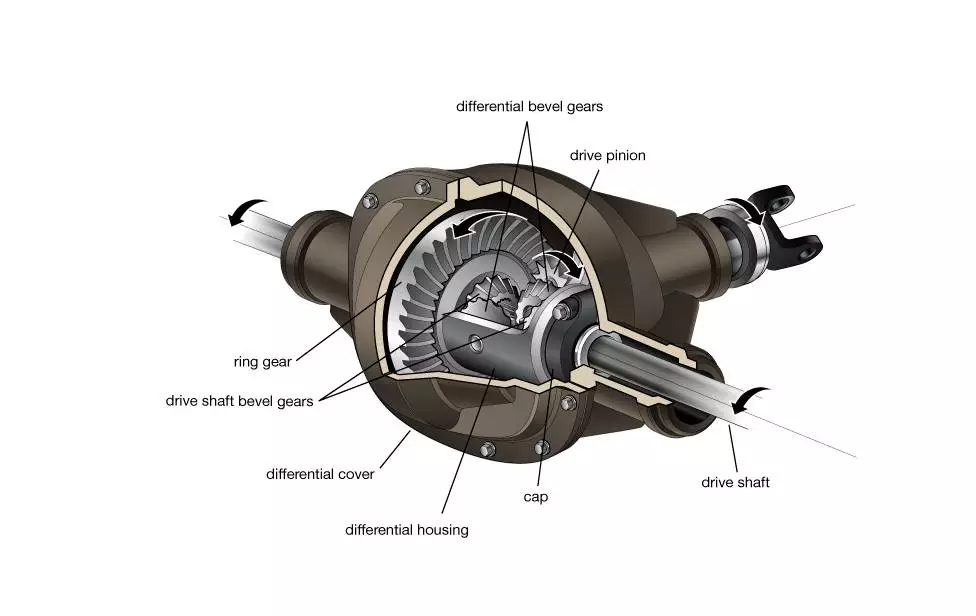
In this instance, what happens (even if you consider a rigid chassis and infinite stiffness car suspension), what happens is that the turning redistributes the vertical forces on each wheel. That changes the magnitude of the friction on each wheel (and also affects the rolling resistance although rolling resistance is not as important). However the magic is in the differential.
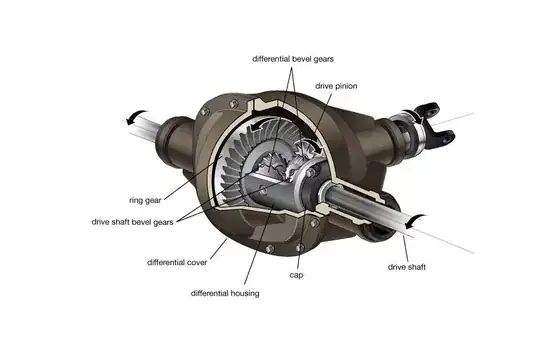
The differential allows (at the same time) each wheel to spin at its own velocity and also allows them to "communicate" (for lack of a better word) and distribute the power to each wheel.
In the particular case of the open differential, when the car is jacked up, and the engine shaft is not rotating, then rotating one wheel has the effect of rotating the other wheel in the opposite way. So, the angular momentum and is preserved.
idling car during turn
I will focus on this case.
So, when an idling car is turning, each wheel is free to spin at its own rate, and at the same time if the outer is spinning faster, the open differential makes the inner wheel spin faster (see the video in this answer). At this point it is important to remind that the torque that slows down the wheels when the car is coasting is from the rolling resistance on each wheel (which is the longitudinal component of the friction). To simplify matters, we'll assume that the rolling resistance is zero (perfectly round wheel) and all the friction force between the wheel and the road is available as traction force.
The traction force
- in the linear acceleration/decel is parallel to the acceleration.
- In the case of uniform circular motion, the traction acts as the centripetal force (pulling the car inwards).
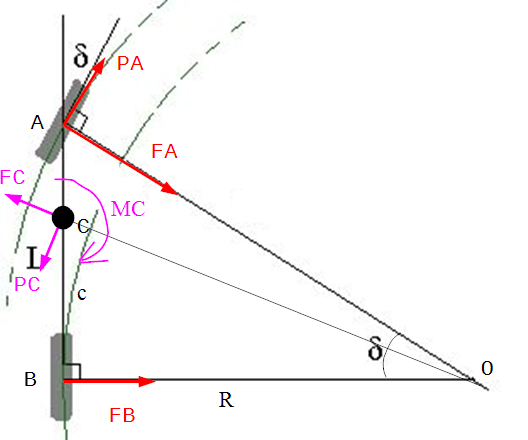
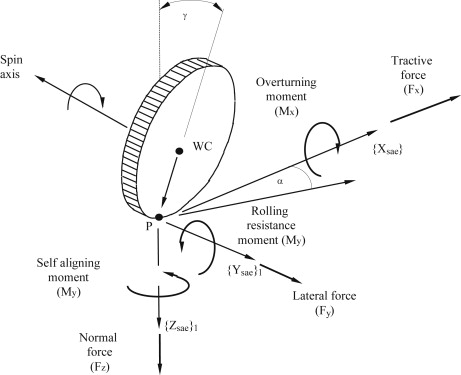
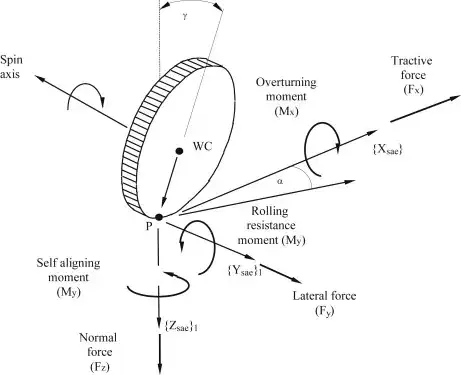
When the car is coasting, the force of the rolling resistance is usually small compared to the radial component (centripetal force). The moment caused by wheel traction (friction forces) in the radial direction (Centripetal) is what causes the rotation moment that turns the car. (See image below)
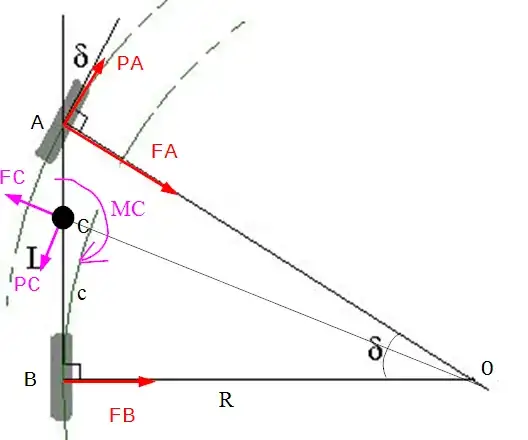
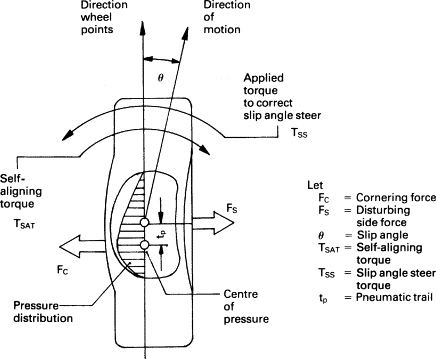
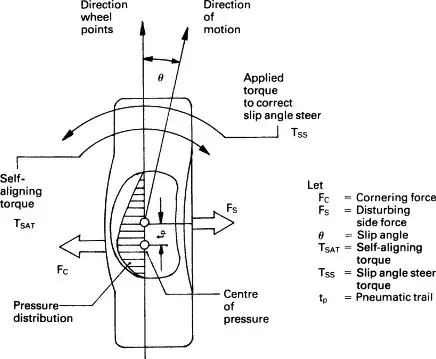
Also it is important to note that the contact of a wheel is not a single point but a contact patch that has a complex behavior.
 |
 |
| Forces on wheel system |
contact patch |
car accelerating through the turn
When the car is using the engine power, then there is an additional factor that affects the kinetics (dynamics). I won't delve into this case because there are a number of factors that will also affect this outcome (namely FWD, RWD, 4WD etc). However bottom line is that there is added torque from the engine. In that case again the differential allows spliting of the torque (and redistribution of power) so that the kinematic constraints are satisfied.