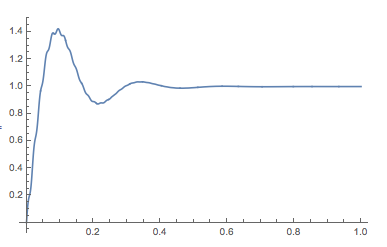
I have trasfer functions of a plant and a controller in laplace domain. I checked for the closed loop response by applying a step response. The system is found to be stable.
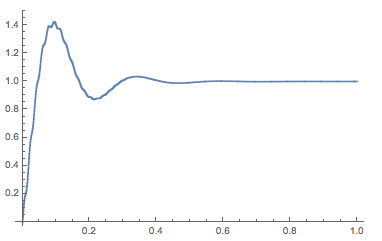
I checked the response of the system for the same step reference in discrete domain. I can see that the closed loop response of the discrete system is unstable. The transfer function is converted to discrete form by c2d option in matlab with a sampling time of 1ms.
Shouldnt the response of the system be same in both continuous and discrete domain (atleast for high sampling frequency)?