I'm also a software guy and not completely master of the subject, but I tried to model your system. Each step is shown, so you can catch mistakes I did.
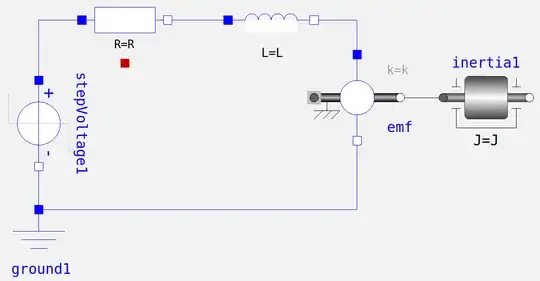
Here is the schematic diagram of DC motor:
Kirchoff's voltage law for electrical circuit:
\begin{equation}\label{eq:kirchoff} \tag{1}
V_s = V_l + V_r + V_e \\
\end{equation}
Newton's $2^{nd}$ law of motion:
\begin{equation}\label{eq:newton} \tag{2}
\sum{F} = ma
\end{equation}
Equation for Electro-Motive-Force (EMF):
\begin{equation}\label{eq:emf} \tag{3}
V_e = K_e \dot{\theta}
\end{equation}
Equation for electro-mechanical convertion of tourque:
\begin{equation}\label{eq:torque} \tag{4}
\tau = K_ti
\end{equation}
Using equations \ref{eq:kirchoff} & \ref{eq:emf}:
$$
u(t) = L \frac{di}{dt} + R i + K_e \dot\theta
$$
Using equations \ref{eq:newton} & \ref{eq:torque}:
$$
K_t i = J \ddot\theta
$$
Laplace transfer of equations:
$$
U(s) = s L I(s) + R I(s) + s K_e \Theta(s) \\
K_t I(s) = s^2 J \Theta(s)
$$
$I(s)$ is common:
$$
I(s) = \frac{U(s) - s K_e \Theta(s)}{s L + R } \\
I(s) = \frac{s^2 J \Theta(s)}{K_t}
$$
$$
\frac{U(s) - s K_e \Theta(s)}{s L + R } = \frac{s^2 J \Theta(s)}{K_t} \\
K_t U(s) - s K_t K_e \Theta(s) = s^3 J L \Theta(s) + s^2 J R \Theta(s) \\
K_t U(s) = s^3 J L \Theta(s) + s^2 J R \Theta(s) - s K_t K_e \Theta(s) \\
K_t U(s) = \Theta(s) ( s^3 J L + s^2 J R - s K_t K_e )
$$
Transfer function of system with voltage input and position output:
$$
\frac{\Theta(s)}{U(s)} = \frac{K_t}{s^3 J L + s^2 J R - s K_t K_e}
$$
If we want to investigate voltage-speed relationship:
$$
s(\frac{\Theta(s)}{U(s)}) = s(\frac{K_t}{s^3 J L + s^2 J R - s K_t K_e}) \\
\frac{s\Theta(s)}{U(s)} = \frac{K_t}{s^2 J L + s J R - K_t K_e})
$$
Applying step input, which is PWM with 100% duty cycle:
$$
\Theta(s) = \frac{\alpha}{s} \frac{K_t}{(s^3 J L + s^2 J R - s K_t K_e)}
$$
It might be good to investigate stability of a system with impulse input instead of step input.
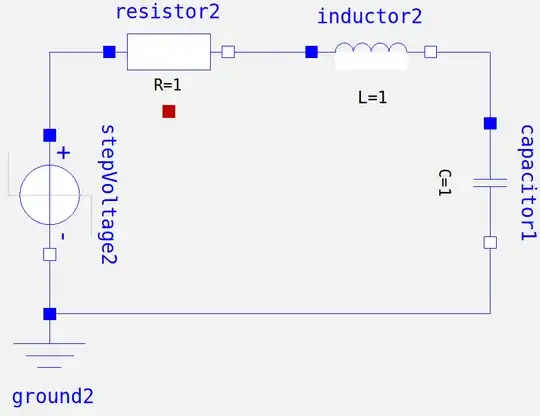
With mobility analogy, Voltage & Velocity are cross variables, Current & Force are through variables, you can also investigate the system as RLC series circuit as shown below.
For $u(t)$ input $V_c$ output, it is voltage-velocity relation and $u(t)$ input $\int{v_c(t)dt}$ for voltage-position relation. So it adds 1 more degree to your system.





